


Tipos y características de los equipos de final de línea. Paletizadores.
En la salida de los sistemas de producción, o en conformación de pedidos multireferencia de los sistemas de distribución, es habitual la necesidad de paletizar o enjaular las cargas para su venta a los clientes.
El paletizado o paletización es la acción y efecto de colocar mercancía sobre un palet para su almacenaje y transporte. El objetivo de la paletización es conseguir uniformidad y facilidad de manipulación; de este modo se ahorra espacio y se rentabiliza el tiempo de estiba, desestiba y manipulación.
Casi todos los tipos de mercancía son susceptibles de paletización, si bien la paletización más habitual es la de las cajas. También es factible hacerlo con sacos, bidones, artículos sueltos, etc. de forma que se aproveche el espacio y que la carga se mantenga estable. La carga de un palet se puede realizar a mano, o de modo más o menos mecanizado.
Los paletizadores mecanizados forman parte de los denominados equipos de "final de línea" y se distinguen tres tipos:
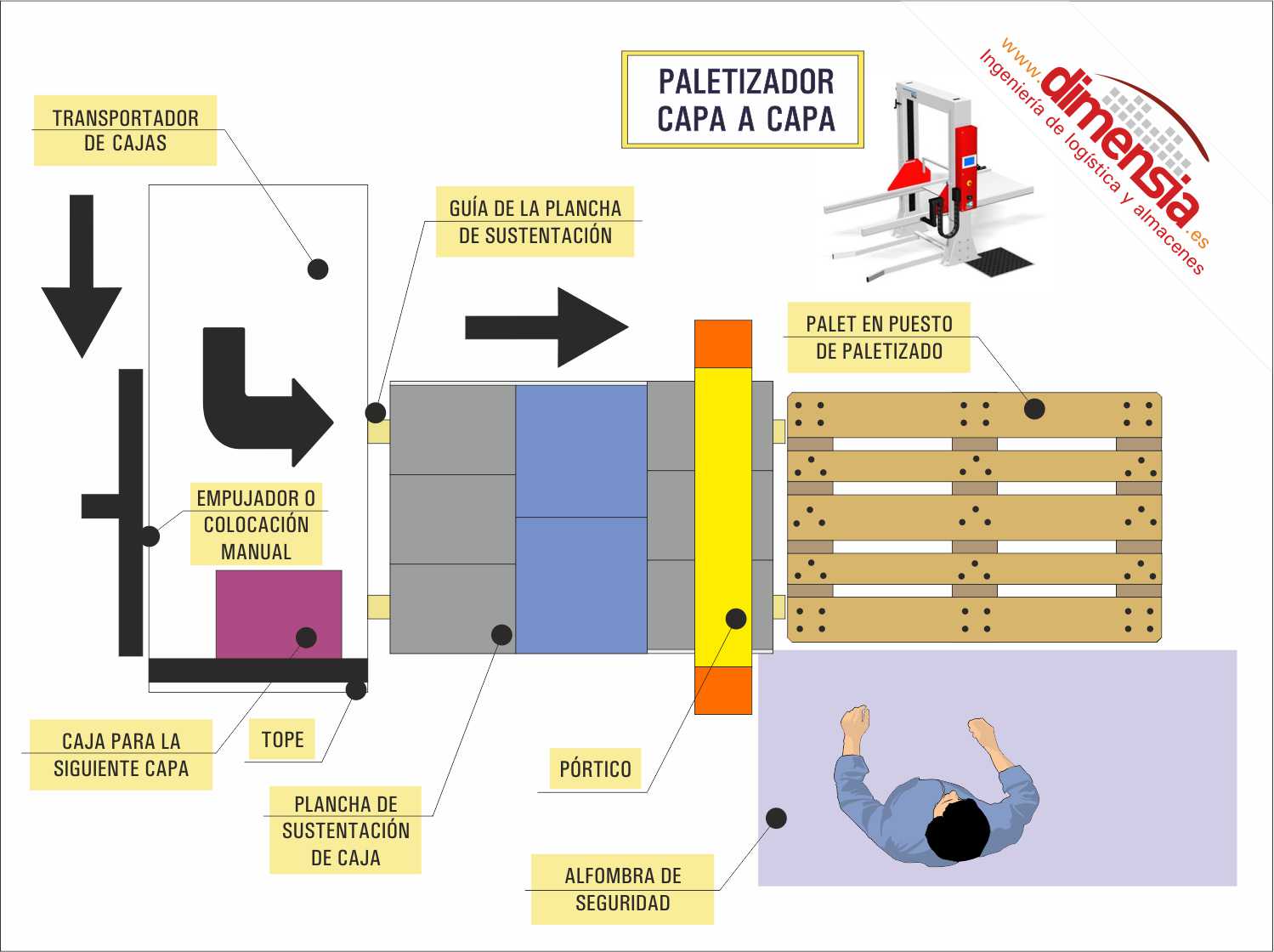
1.- Paletizadores de capas.
Se trata de un sistema mecanizado en el que la máquina coloca la carga capa a capa. Las cargas (por capa) deben tener la misma altura.
Las cargas se colocan (manualmente o casi siempre mecánicamente) sobre una bandeja plana que se desplaza en sentido horizontal desde la parte de carga de la bandeja hasta situarse encima del palet.
A medida que la altura de la carga del palet va aumentando, la citada bandeja tiene, a través de un pórtico, la posibilidad de llevar a cabo movimientos verticales.
2.- Robots paletizadores cartesianos (3 ejes).
Los sistemas de paletizado automático mediante robots se utilizan para aquellas situaciones en las que la cadencia de salida de palets, las condiciones de trabajo y/o la ergonomía lo hacen aconsejable.
Ya hemos analizado esta tecnología en un artículo anterior de este blog.
Ver artículo sobre robots cartesianos.
3.- Robots Antropomórficos.
Los robots articulados o antropomórficos están indicados para lograr una mayor cadencia en cuanto a que los recorridos son menores y están más optimizados.
La concepción de la pinza del robot depende de varios factores; mosaicos a formar, número de cajas en toma múltiple, tipo de cartón de las cajas, fragilidad del producto, distribución de su peso en el interior, calidad del precintado etc.
